Resilient design and smart systems drive Northeastern’s Mars rover to podium finish
The team competed against 37 others at the Mars Society’s Desert Research Station outside of Hanksville, Utah, last month in what is considered the largest collegiate rover competition in the world.


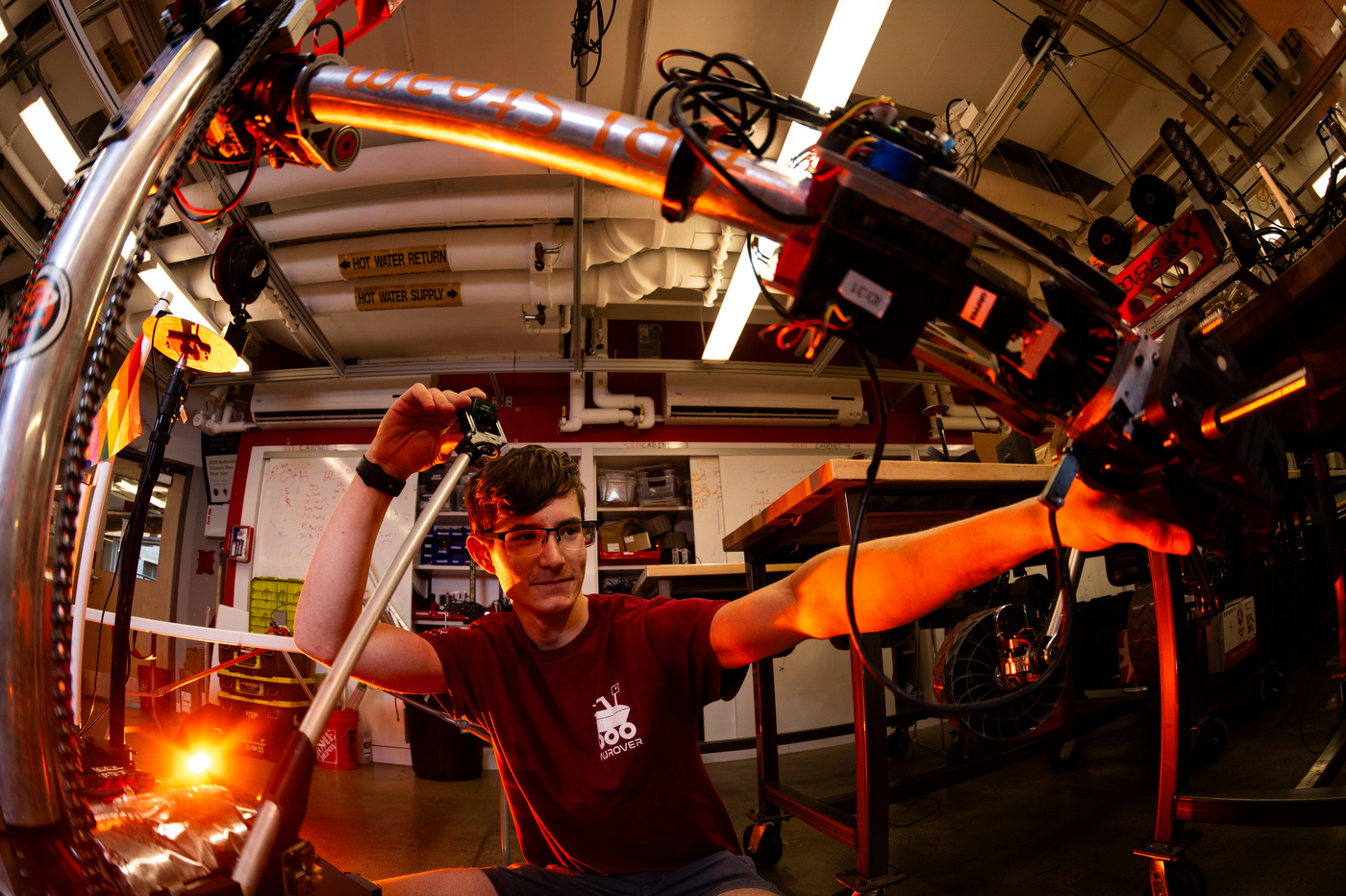
Coming into this year’s University Rover Challenge, Northeastern’s Mars Rover team was raring to compete after spending the past year making enhancements to its flagship rover, Watney Mark VI.
Among the many refinements made to the rover are a new brushless motor drive system, upgraded life detection components and a more efficient electrical power system.
Thanks to those improvements, the team’s rover is now easier to control and accelerate and is much better equipped to handle harsh terrain and challenging Mars missions.
The team competed against 37 others at the Mars Society’s Desert Research Station outside of Hanksville, Utah, last month in what is considered the largest collegiate rover competition in the world. Northeastern placed second in System Acceptance Review scores, based on a video and technical paper submission that served to narrow the field from an initial 114 entrants from 15 countries.
The team’s hard work paid off, landing it a spot on the podium with an impressive third-place finish.
“In prior years, we’ve been very good at being precise but not good at lifting. Or we’d be very good at driving, but not super good at having great camera streams to actually see where you’re driving,” says Noah Büttner, an incoming fourth-year student at Northeastern University and the engineering integration lead for the university’s Mars rover team.
“This year, we have all systems working at some level, and I think the third-place win definitely reflects that,” he adds.


The challenge called for each team to complete four high-stakes missions designed to test their rover’s capabilities — a science mission requiring the rover to collect and analyze soil samples for life; a delivery mission that called for the rover to assist astronauts on the field; an equipment servicing mission in which the rover had to repair and service a piece of equipment on a mock-up lander; and an autonomous navigation mission designed to test the rover’s autonomous capabilities.
The team placed in the top five in each of the four missions, having its best showing during the science mission, scoring 98 points out of 100.
The mission required the team to collect soil samples and analyze them using the rover’s onboard life detection system, which was given several upgrades this year, including a new ultraviolet spectrometer and a new auger, a tool used to bore holes, says Dylan Wolter, mechanical co-lead for Northeastern’s Mars Rover team and an incoming fourth-year student at Northeastern.
“It’s a completely new system,” says Wolter. “We really focused on robustness and accessibility.”
Those upgrades assisted the team in increasing the “number of detection pieces” for evidence of life, says JiaJia Fu, the life detection team lead for Northeastern’s Mars Rover team and an incoming fourth-year student at Northeastern.
On the electrical and mechanical side, the team made big revisions to the rover’s drive system to improve its acceleration capabilities, Büttner says. The rover now features brushless motors, which provide the team with greater control over the system. The team also swapped out the rover’s 48-volt powered system for a 24-volt powered one.
“A big issue we had at the competition last year is that when attempting to accelerate very quickly, the rover would not accelerate at all. We found out this was due to our regulators not providing enough current and the voltage dropping, causing the rover to not move. We fixed that problem this year, but it required a lot more redesign than we were originally thinking.”




Additionally, the team has introduced a number of redundancies to account for unforeseen challenges.
The equipment servicing mission, for example, required the rover to handle and manipulate pieces of equipment, including flipping switches, pressing buttons and typing on a keyboard.
Initially, the team communicated with the rover using its new 5.8 gigahertz Wi-Fi communication band, but that stopped working within minutes of the challenge starting, explains Sam Damonti, an incoming fourth-year student at Northeastern and the software lead for the rover team.
Editor’s Picks





They quickly pivoted and started interacting with the rover’s older 900 megahertz communications band instead.
“We were losing communication,” Damonti says. “Camera streams weren’t coming across properly, so quickly swapped to the other radio. It was super cool to see and really rewarding that we had gotten it all worked out earlier.”
“In prior years, we had only ever run with one communication system at a time, but this year, we were able to switch over very quickly, within seconds,” Büttner adds.
That wasn’t the only hiccup the team faced during the mission — one of the rover’s six wheels fell off. It was one of the rover’s front wheels, which made it impossible for it to drive forward.
However, the rover was able to be driven backward and completed the mission within seconds of its ending.
“It was a buzzer-beater moment,” Büttner says. “You might think it’s all over once you’ve lost a wheel, but no, you can still drive around and get points.”
The team learned some of its most valuable lessons when things went wrong. It was able to quickly understand why the wheel fell off after the mission was done and was able to reattach it quickly for the following missions that day, Büttner explains.
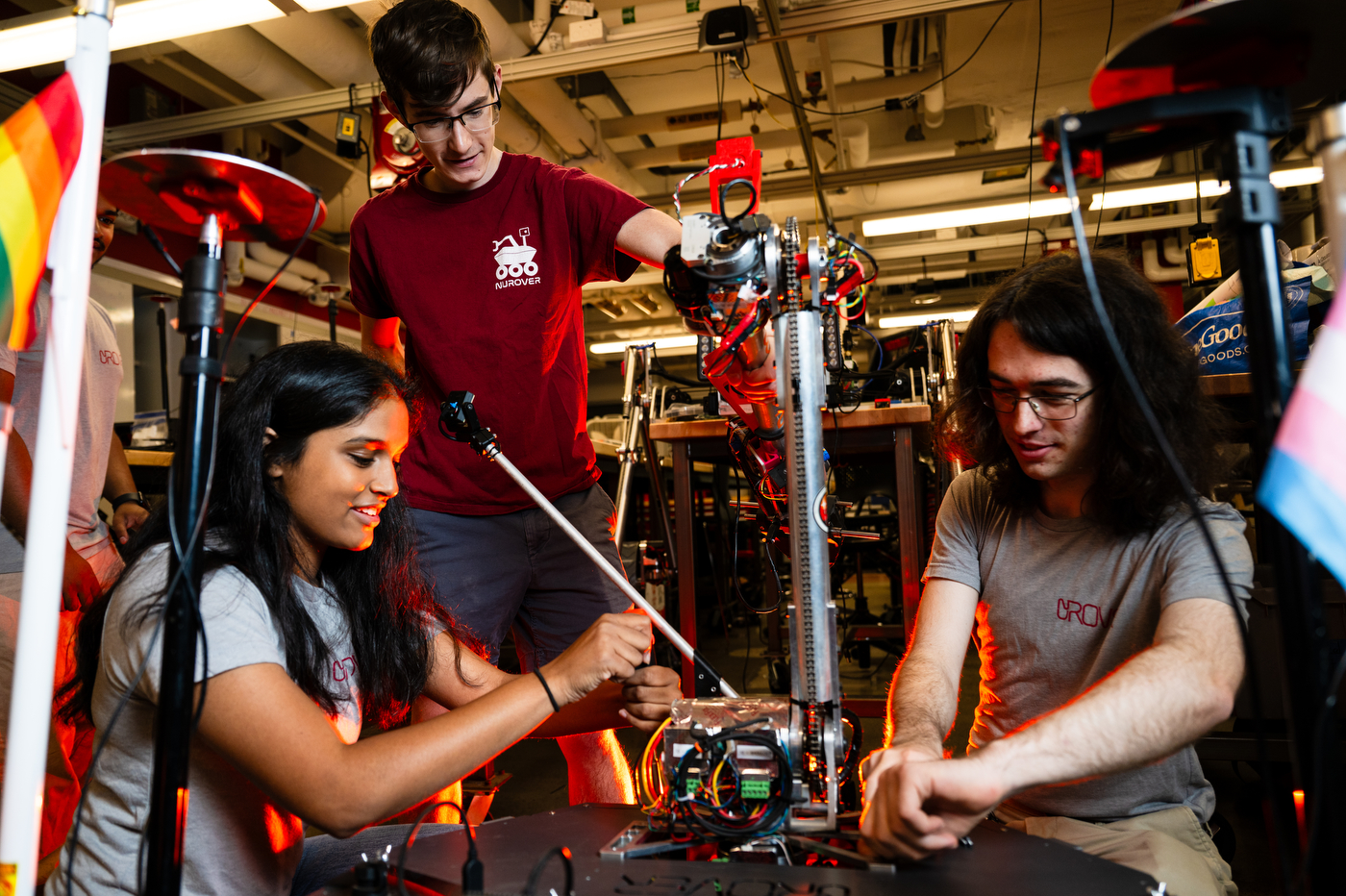
In reflecting on the third-place finish, Büttner says it exemplifies just how well-rounded a machine the 50-person team had created.
Since Northeastern’s Mars rover team began competing in the University Rover Challenge it has consistently risen up the ranks.
It climbed from 20th in 2019 to 16th in 2022, 13th in 2023, and cracked the top 10 last year.
It also won first place at the Winter Canadian International Rover Challenge last year.
The rover team will compete in Canada again this August. In addition to competing with Watney, the team also plans to bring Lincoln, a newer rover it has been developing over the past year that features a modular drive base that can change its height and drive sideways.
“We want to try new things and make sure we are pushing ourselves,” says Damonti. “We’re really pushing to learn new things and get people involved.”





